Önvezető autók jelentek meg Budapest I. kerületében
(2026 március)
"Ma megjött a második olyan önvezető autó, ami majd az I. kerületben jön-megy, és jövő héten be is fogjuk mutatni”. Önvezető autók jelennek meg Budapest I. kerületében, jelentette be Palkovics László, a mesterséges intelligenciáért felelős kormánybiztos. Budapest Hamburg és München után Európa harmadik városa lesz, ahol négyes szintű önvezető járművek közlekednek (https://www.economx.hu/magyar-gazdasag/palkovics-laszlo-onvezeto-autok-budapest.825634.html)
Az önvezető autó, amely már rója az utcákat, négyes szintű önvezetéssel működik majd 2027-től, ami azt jelenti, hogy bár van benne kormánykerék és pedálok, de az autó önmagát vezeti, most még"tanul".
Az önvezető autó, amely már rója az utcákat, négyes szintű önvezetéssel működik majd 2027-től, ami azt jelenti, hogy bár van benne kormánykerék és pedálok, de az autó önmagát vezeti, most még"tanul".
A jármű irányítását befolyásoló technikai rendszereket akkor tekintik elfogadhatónak, ha azok megfelelnek az ENSZ Európai Gazdasági Bizottsága vonatkozó előírásainak, vagy pedig olyan rendszerekről van szó, amelyeket a jármű vezetője bármikor felülbírálhat, ami azt jelenti, hogy a sofőr bármikor kikapcsolhatja azokat, vagy visszaveheti a kézi irányítást.
A módosítás eredményeként egészen a magas szintű automatizáltság szintjéig – a négyes fokozatig –, a teljesen autonóm irányítás előtti szakaszig engedélyezhetővé válnak az elfogadható rendszerekkel felszerelt járművek, tehát az általános jogi szabályozási háttér már rendelkezésre áll az EU-ban.
(https://juratus.elte.hu/onvezeto-autok-mit-mond-az-unios-jog/)Magyarországon a személyautók zárt oszlopban (platooning) történő haladása jelenleg nem lehetséges, de az új KRESZ-be be kéne építeni a zárt oszlopban történő közlekedés jövőbeli lehetőségét. A jelenleg hatályos 1/1975. (II. 5.) KPM–BM együttes rendelet nem teszi lehetővé az automatizált, szoros követési távolságú haladást közúton. A szabályozás előírja a biztonságos követési távolság megtartását, ami ellentmond a platooning lényegének (minimális távolság a biztonságos haladásért, az üzemanyag-megtakarításért). Az Építési és Közlekedési Minisztérium dolgozik az átfogó KRESZ-módosításon, amelyet várhatóan 2026 tavaszán véglegesítenek, a csomag talán már érinti az önvezető és hálózatba kapcsolt járművek (V2X) közlekedési feltételeit is. A 6/1990. (IV. 12.) KöHÉM rendelet módosítása korábban már megteremtette az alapjait annak, hogy Magyarországon tesztelési céllal, külön engedéllyel közlekedhessenek önvezető funkciókkal ellátott járművek közúton.
A zalaegerszegi ZalaZONE járműipari tesztpálya Európa egyik legmodernebb létesítménye, ahol kifejezetten kutatják és tesztelik a járműkonvojok (platooning) dinamikáját és a hálózatba kapcsolt vezetést. A HUN-REN SZTAKI kutatói aktívan dolgoznak olyan algoritmusokon, amelyek lehetővé teszik a járművek számára a biztonságos, összehangolt manőverezést, beleértve a vészhelyzeti protokollokat is. A hazai fejlesztésekben a CACC (Cooperative Adaptive Cruise Control) rendszereket alkalmazzák, amelyek az 5G hálózat segítségével (V2V kommunikáció) hangolják össze a járművek mozgását.
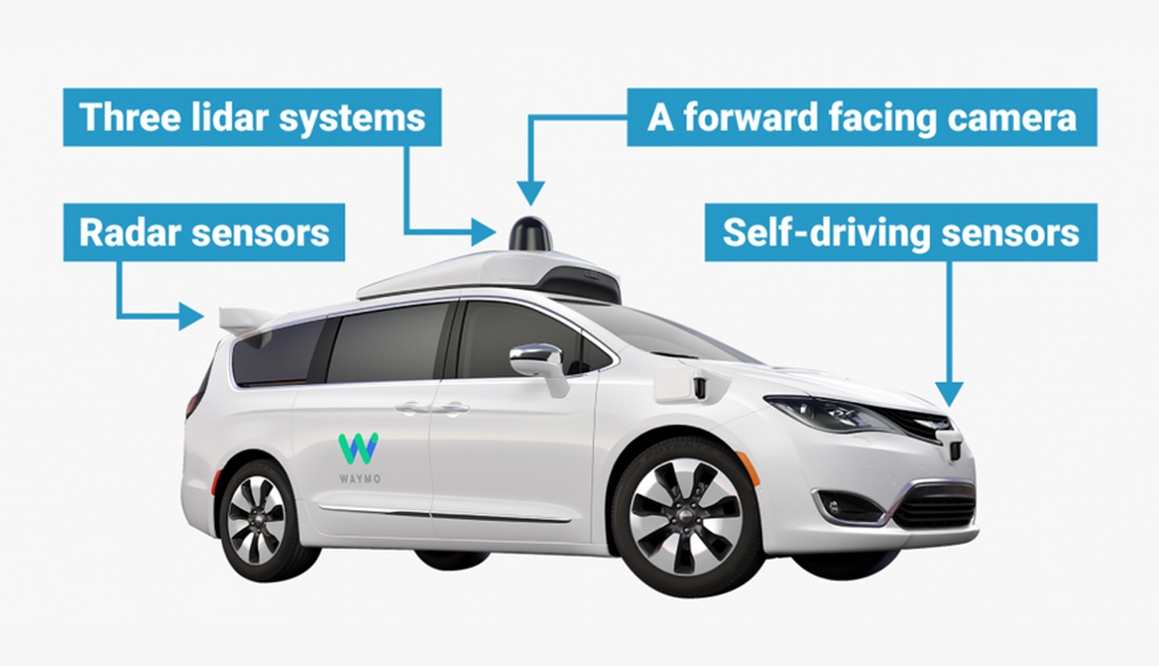
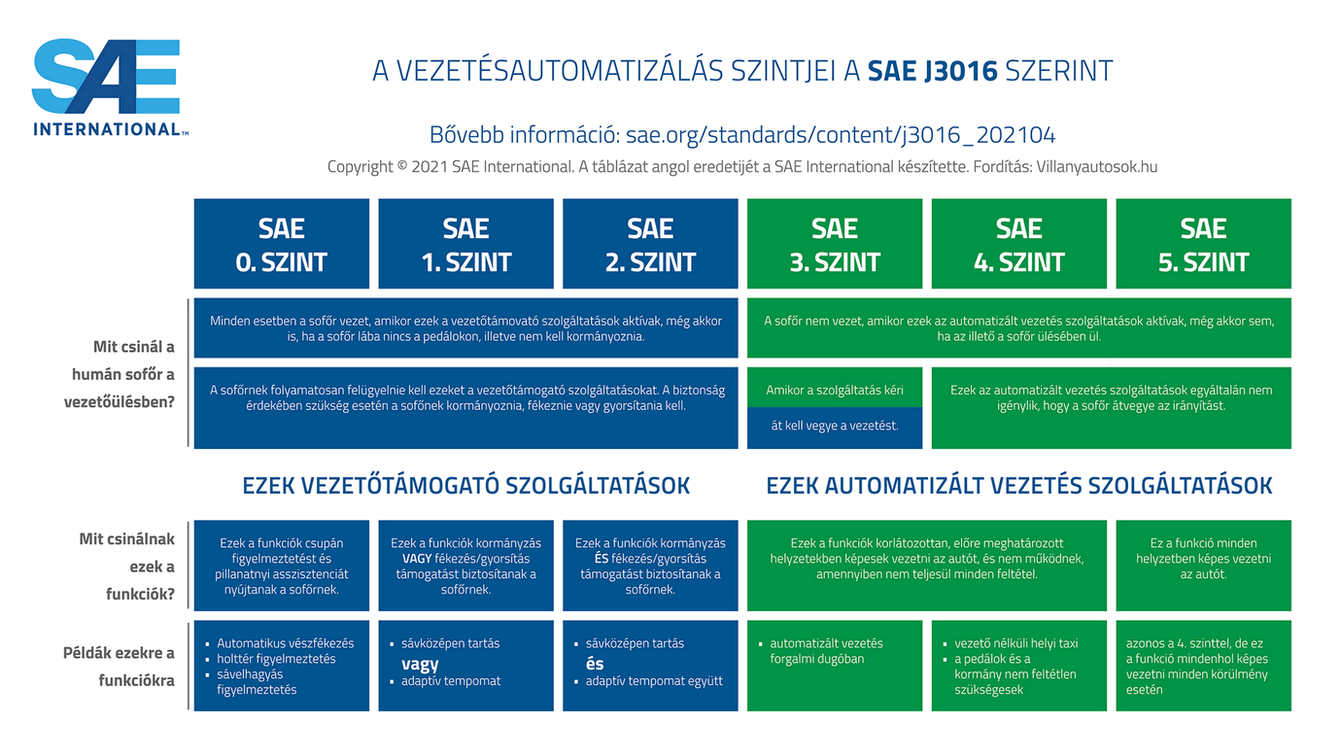
Az önvezető autók fedélzeti rendszere szenzorokból, videokamerákból, lézerradarból és egy felhőalapú irányítórendszerből áll, ami tanulja, hogyan vezetnek egy adott területen- városban, országúton, esetünkben az I. kerületben- közlekedni az autók. Az önvezető autóknál az emberi hibából fakadó balesetek 80 százaléka már nem fordul elő. A 4-es szintű önvezetésnél (High Automation) azt jelenti, hogy az autó képes emberi beavatkozás nélkül közlekedni meghatározott körülmények között (például kijelölt városi zónákban vagy autópályán). Kell sofőr, de filmet is nézhet, nem kell készenlétben állnia a kormány átvételére, csak ha az autó elhagyja a kijelölt területet, ami a földrajzi korlátozás (Geofencing), azaz az autó csak előre meghatározott területeken vagy specifikus időjárási viszonyok között működhet önállóan. Amikor a rendszer elhagyja a támogatott zónát, és a sofőr nem veszi át az irányítást, az autó képes magától biztonságosan félrehúzódni és megállni. A megengedett zónában az autó képes önállóan navigálni. és a sofőrnek nem kell beavatkoznia, csak különleges helyzetekben. A teszteket a Mobileye közreműködésével végzik. Tehát a 4-es szint limitált: bizonyos földrajzi területekre, időjárási körülményekre és forgalmi helyzetekre vonatkozik. Az önvezető járművek (speciálisan felszerelt autók) szenzorokkal, kamerákkal és LIDAR-ral vannak ellátva, hogy felismerjék a forgalom sajátosságait (Level 4).

A Budai Várban mutatták be (2026 március 26.) azokat az önvezető járműveket, amelyek a kormányzati és iparági szereplők szerint új korszakot nyithatnak a hazai közlekedésben. A bemutatón Palkovics László arról beszélt, hogy Magyarország már nemcsak gyártani, hanem fejleszteni és tesztelni is tud önvezető rendszereket. A cél, hogy még az év vége előtt valódi forgalomban is megjelenhessenek a magas autonómiaszintű autók. A bemutatott járművek még nem a teljesen autonóm kategóriát képviselik, hanem kettes szint plusz (Level 2+) önvezető technológiával működnek, azt a technológiát az izraeli Mobileye nevű cég biztosítja (https://index.hu/gazdasag/2026/03/26/onvezeto-taxi-palkovics-laszlo-robot-teszt-zalazone-hunren/).
Átépítés Level2+-ról Level4-re: a Mobileye cég a szintek közötti átmenetet nem egyetlen ugrásként, hanem egy skálázható platformként kezeli. A cég filozófiája szerint a Level 2+-tól a Level 4-ig vezető út három fő pillérre épül: REM (térképezés), RSS (biztonsági modell) és a True Redundancy (szenzoros redundancia).
1. A Mobileye SuperVision™ (Level 2+) rendszer a "belépő" a magasabb szintű automatizálás felé.
Technológia: Tisztán kamera-alapú rendszer (általában 11 kamera), amely 360 fokos látást biztosít.
Működés: "Hands-off, eyes-on", azaz a sofőr leveheti a kezét a kormányról, de a figyelme nem lankadhat.
Átalakíthatóság: a Level 4 alapja, a szoftveres környezet és a térképezési adatok már itt is ugyanazok, mint a magasabb szinteken.
2. Mobileye Chauffeur™ (Level 3), ahol a felelősség már bizonyos körülmények között a rendszeré.
Bővítés: A SuperVision kamera-rendszeréhez hozzáadnak egy aktív szenzoros alrendszert (radarokat és LiDAR-t).
Redundancia: Két független alrendszer működik párhuzamosan. Ha az egyik (pl. a kamera) a napfény miatt elvakul, a másik (radar/LiDAR) továbbra is lát.
3. Mobileye Drive™ (Level 4) teljes körű önvezető rendszer, amelyet Robotaxikhoz és szállító járművekhez terveztek.
Szenzorkészlet: 13 kamerát, 3 hosszú hatótávolságú LiDAR-t, 6 rövid hatótávolságút és 6 radart tartalmaz.
Hardver: Több EyeQ6 processzor dolgozik együtt a hatalmas adatmennyiség feldolgozásához.
Térképezés: A REM (Road Experience Management) technológia segítségével az utakon futó millió autónyi Mobileye-szenzor folyamatosan, felhő alapon frissíti a centiméter pontos térképeket.
A Mobileye szerint a Level 4 eléréséhez nem elég a több szenzor; a rendszert úgy kell felépíteni, hogy a kamera-alapú látás önmagában is képes legyen vezetni, és a radar/LiDAR egység is önmagában is képes legyen ugyanerre. Ez a True Redundancy (valódi redundancia) elve: a két rendszer nem csak kiegészíti egymást, hanem egymástól függetlenül validálja a döntéseket, ami erősen növeli a biztonságot.
1. A Mobileye SuperVision™ (Level 2+) rendszer a "belépő" a magasabb szintű automatizálás felé.
Technológia: Tisztán kamera-alapú rendszer (általában 11 kamera), amely 360 fokos látást biztosít.
Működés: "Hands-off, eyes-on", azaz a sofőr leveheti a kezét a kormányról, de a figyelme nem lankadhat.
Átalakíthatóság: a Level 4 alapja, a szoftveres környezet és a térképezési adatok már itt is ugyanazok, mint a magasabb szinteken.
2. Mobileye Chauffeur™ (Level 3), ahol a felelősség már bizonyos körülmények között a rendszeré.
Bővítés: A SuperVision kamera-rendszeréhez hozzáadnak egy aktív szenzoros alrendszert (radarokat és LiDAR-t).
Redundancia: Két független alrendszer működik párhuzamosan. Ha az egyik (pl. a kamera) a napfény miatt elvakul, a másik (radar/LiDAR) továbbra is lát.
3. Mobileye Drive™ (Level 4) teljes körű önvezető rendszer, amelyet Robotaxikhoz és szállító járművekhez terveztek.
Szenzorkészlet: 13 kamerát, 3 hosszú hatótávolságú LiDAR-t, 6 rövid hatótávolságút és 6 radart tartalmaz.
Hardver: Több EyeQ6 processzor dolgozik együtt a hatalmas adatmennyiség feldolgozásához.
Térképezés: A REM (Road Experience Management) technológia segítségével az utakon futó millió autónyi Mobileye-szenzor folyamatosan, felhő alapon frissíti a centiméter pontos térképeket.
A Mobileye szerint a Level 4 eléréséhez nem elég a több szenzor; a rendszert úgy kell felépíteni, hogy a kamera-alapú látás önmagában is képes legyen vezetni, és a radar/LiDAR egység is önmagában is képes legyen ugyanerre. Ez a True Redundancy (valódi redundancia) elve: a két rendszer nem csak kiegészíti egymást, hanem egymástól függetlenül validálja a döntéseket, ami erősen növeli a biztonságot.
A Mobileye imaging radar technológiája jelentős szemléletváltást képvisel az önvezetésben. Míg korábban egyedül a LiDAR-t tartották az egyetlen eszköznek a nagy felbontású 3D-s látáshoz, a Mobileye saját fejlesztésű, szoftvervezérelt 4D radarjaival kívánja kiváltani azokat a legtöbb pozícióban.
A hagyományos radarokkal ellentétben az imaging radar nem csak távolságot és sebességet mér, de szintén egy nagy felbontású pontfelhőt generál, hasonlóan a LiDAR-hoz.
A hagyományos radarokkal ellentétben az imaging radar nem csak távolságot és sebességet mér, de szintén egy nagy felbontású pontfelhőt generál, hasonlóan a LiDAR-hoz.
Magassági adat (4. dimenzió): A hagyományos radarok gyakran nem tudták megkülönböztetni az úton lévő akadályt egy felüljárótól. Az imaging radar már látja a tárgyak magasságát is, így pontosan azonosítja a statikus objektumokat.
Hatalmas felbontás: A Mobileye rendszere több mint 1500 virtuális csatornát használ, ami 0,5 fok alatti szögbontást tesz lehetővé. Ez elég finom ahhoz, hogy 150 méterről észrevegyen egy gyereket egy busz mellett, vagy 350 méterről egy gyalogost.
Időjárásállóság: a legnagyobb előnye a LiDAR-ral szemben. Mivel rádióhullámokat használ, ködben, sűrű esőben vagy hóban is tökéletesen lát, ahol a lézer alapú rendszerek (LiDAR) elvéreznek.
A Mobileye nemrég leállította saját belső LiDAR-fejlesztését, mert úgy látják, hogy az imaging radar technológia gyorsabban fejlődik és sokkal olcsóbb. A Level 4-es rendszereiknél a oldalsó és hátsó LiDAR-okat teljesen ki akarják váltani az imaging radarokkal.
Első LiDAR: Jelenleg még megtartják az előre néző LiDAR-t a legmagasabb biztonsági szintekhez (Level 3/4), de a cél az, hogy a jövőben a legtöbb autóban a kamera és a radar páros elegendő legyen a teljes önvezetéshez.
Gazdasági előnyök: az új technológia 2028-tól kerülhet sorozatgyártásra. Az imaging radar legfőbb vonzereje, hogy nagyságrendekkel olcsóbb, mint a LiDAR, ugyanakkor a Mobileye True Redundancy elve alapján képes önállóan is biztonságosan irányítani az autót, ha a kamerarendszer valamiért kiesne.
Hatalmas felbontás: A Mobileye rendszere több mint 1500 virtuális csatornát használ, ami 0,5 fok alatti szögbontást tesz lehetővé. Ez elég finom ahhoz, hogy 150 méterről észrevegyen egy gyereket egy busz mellett, vagy 350 méterről egy gyalogost.
Időjárásállóság: a legnagyobb előnye a LiDAR-ral szemben. Mivel rádióhullámokat használ, ködben, sűrű esőben vagy hóban is tökéletesen lát, ahol a lézer alapú rendszerek (LiDAR) elvéreznek.
A Mobileye nemrég leállította saját belső LiDAR-fejlesztését, mert úgy látják, hogy az imaging radar technológia gyorsabban fejlődik és sokkal olcsóbb. A Level 4-es rendszereiknél a oldalsó és hátsó LiDAR-okat teljesen ki akarják váltani az imaging radarokkal.
Első LiDAR: Jelenleg még megtartják az előre néző LiDAR-t a legmagasabb biztonsági szintekhez (Level 3/4), de a cél az, hogy a jövőben a legtöbb autóban a kamera és a radar páros elegendő legyen a teljes önvezetéshez.
Gazdasági előnyök: az új technológia 2028-tól kerülhet sorozatgyártásra. Az imaging radar legfőbb vonzereje, hogy nagyságrendekkel olcsóbb, mint a LiDAR, ugyanakkor a Mobileye True Redundancy elve alapján képes önállóan is biztonságosan irányítani az autót, ha a kamerarendszer valamiért kiesne.
A LiDAR-t radarral történő helyettesítése:
Felbontás és pontosság: a LiDAR lézersugarakat használ, amelyekkel nagy felbontású, 3D-s „pontfelhőt” készít a környezetről, mozgó alkatrészeket használ. A radar mikrohullámokkal dolgozik, amelyek hullámhossza nagyobb, a képe „elmosódottabb”.
Tárgyfelismerés: A LiDAR pontossága lehetővé teszi a tárgyak formájának precíz azonosítását. A radar inkább a mozgó tárgyak távolságának és sebességének mérésében kiváló, de a környezet részletes feltérképezésére önmagában kevésbé alkalmas.
A radar (vagy a nagy felbontású, úgynevezett 4D imaging radar) átveheti a LiDAR szerepét sűrű köd, az eső vagy a hó esetén. A radar hullámai áthatolnak ezeken, rossz látási viszonyok között megbízhatóbb.
Költségek: A radarrendszerek jelenleg lényegesen olcsóbbak és tartósabbak (nincsenek bennük mozgó alkatrészek), mint a hagyományos mechanikus LiDAR-ok.
Hatótávolság: A radar általában nagyobb távolságból képes észlelni a tárgyakat, mint az autókban használt átlagos LiDAR-ok.
Míg a legtöbb önvezető autófejlesztő (pl. Waymo, Volvo) a szenzorfúzióban hisz (LiDAR, radar és kamerák együttes használata), addig például a Tesla már elvetette a LiDAR-t, sőt, újabb modelljeiből a radart is elhagyta, és kizárólag kamerákra (Vision) támaszkodik. A modern 4D radarok már kezdenek olyan felbontást elérni, amivel bizonyos alkalmazásokban feleslegessé tehetik a drága LiDAR-okat. Radar+ Flash LiDAR (fix rácsoa lézer mérés) lehet az optimális megoldás.
Felbontás és pontosság: a LiDAR lézersugarakat használ, amelyekkel nagy felbontású, 3D-s „pontfelhőt” készít a környezetről, mozgó alkatrészeket használ. A radar mikrohullámokkal dolgozik, amelyek hullámhossza nagyobb, a képe „elmosódottabb”.
Tárgyfelismerés: A LiDAR pontossága lehetővé teszi a tárgyak formájának precíz azonosítását. A radar inkább a mozgó tárgyak távolságának és sebességének mérésében kiváló, de a környezet részletes feltérképezésére önmagában kevésbé alkalmas.
A radar (vagy a nagy felbontású, úgynevezett 4D imaging radar) átveheti a LiDAR szerepét sűrű köd, az eső vagy a hó esetén. A radar hullámai áthatolnak ezeken, rossz látási viszonyok között megbízhatóbb.
Költségek: A radarrendszerek jelenleg lényegesen olcsóbbak és tartósabbak (nincsenek bennük mozgó alkatrészek), mint a hagyományos mechanikus LiDAR-ok.
Hatótávolság: A radar általában nagyobb távolságból képes észlelni a tárgyakat, mint az autókban használt átlagos LiDAR-ok.
Míg a legtöbb önvezető autófejlesztő (pl. Waymo, Volvo) a szenzorfúzióban hisz (LiDAR, radar és kamerák együttes használata), addig például a Tesla már elvetette a LiDAR-t, sőt, újabb modelljeiből a radart is elhagyta, és kizárólag kamerákra (Vision) támaszkodik. A modern 4D radarok már kezdenek olyan felbontást elérni, amivel bizonyos alkalmazásokban feleslegessé tehetik a drága LiDAR-okat. Radar+ Flash LiDAR (fix rácsoa lézer mérés) lehet az optimális megoldás.
A 4D imaging radar a hagyományos radarok „következő generációja”. A klasszikus radarok csak a tárgyak távolságát, irányát és sebességét látják, a 4D technológia egy negyedik dimenziót is hozzáad: a magasságot.
Amit a „4D” mér:
Távolság (Range)
Vízszintes szög (Azimuth)
Relatív sebesség (Doppler)
Függőleges szög/Magasság (Elevation)
Vízszintes szög (Azimuth)
Relatív sebesség (Doppler)
Függőleges szög/Magasság (Elevation)
A hagyományos radar legnagyobb hibája az volt, hogy nem tudta eldönteni: az előtte lévő fémtárgy egy álló autó az úton, vagy egy felüljáró, ami alatt átfér. A 4D radar már látja a magassági különbséget, így nem fékez feleslegesen a hidak alatt, de észleli a földön fekvő akadályokat. A modern 4D radarok (mint pl. az Arbe vagy a Continental rendszerei) már több ezer virtuális csatornát használnak, így a LiDAR-hoz hasonló, bár annál még mindig valamivel szemcsésebb „pontfelhőt” generálnak. Képesek felismerni az objektumok körvonalait (pl. biciklis vs. autó), amit korábban csak a LiDAR vagy a kamera tudott.
Jelenleg a csúcskategóriás autókban (pl. BMW iX, Lotus Eletre) már megjelentek a !d-s radarok. Sok szakértő szerint a 4D radarok fejlődése miatt a LiDAR-ra hamarosan csak a legmagasabb szintű (Level 4-5) önvezetésnél lesz szükség, az átlagos autók biztonsági rendszereit (Level 2-3) a 4D radar is tökéletesen kiszolgálja majd.
A modellek a Zeekr 001 volt, a kínai Geely-csoport prémium elektromos autói, sportos kombi kialakítással, akár 536–900 lóerős teljesítménnyel és extrém hatótávval. Az autóban lévő Level 2+ önvezető szint azt jelenti, hogy az autó képes például elvinni a sofőrt a boltba, de közben figyelni kell a kormányra, és nem lehet teljesen elengedni a vezetést.

A Budapesten látható autók
(https://index.hu/gazdasag/2026/03/26/onvezeto-taxi-palkovics-laszlo-robot-teszt-zalazone-hunren/)
A kormánybiztos célja az idei év végére a 4-es szint elérése, ahol már az utas akár olvashat is, miközben a jármű végzi a feladatát. Ugyanakkor a 4-es szint csak bizonyos útszakaszokon vagy közlekedési viszonyok mellett (például világosban) érhető el. A legmagasabb az 5-ös szint, amikor minden körülmények között sofőr nélkül megy az autó még egy távolabbi jövő.
Palkovics László bejelentette, hogy a cél az, hogy a közúti forgalomban is megjelenhessenek ezek az autonóm járművek. Palkovics szerint van jelentősége annak, hogy Budapesten mutatják be az önvezetést, mert a város szerkezete korántsem olyan egyszerű, mint sok amerikai vagy kínai nagyvárosé, ezért az itt működő technológia komolyabb mérnöki teljesítményt jelent.
Magyarországnak komoly előzményei vannak az autonóm járművek területén, mert már a kilencvenes évek közepén is futottak olyan hazai kísérletek, amelyek kamerával figyelték a sávokat, és képesek voltak beavatkozni a jármű mozgásába. Az elmúlt években a jogszabályi környezetet is úgy alakították át, hogy Magyarországon országúton is lehessen különböző szintű autonóm rendszereket tesztelni.
A bejelentést megelőző szakmai program másik fontos felszólalója Bokor József, a HUN-REN SZTAKI tudományos igazgatója volt, aki megerősítette, hogy a mostani bemutató mögött hosszú kutatási folyamat áll. Az első megoldások még egyszerű kamerarendszerrel és korlátozott számítási kapacitással működtek. A korábbi teherautós kísérletek helyett most Lexus RX 450h típusú tesztjárművekkel dolgoznak, és a fejlesztésekben már a megerősítéses tanulás, a mélytanulás, valamint fejlett mozgástervezési és szabályozási algoritmusok is szerepet kapnak. Bokor szerint Budapest különösen nagy kihívást jelent, de éppen ezért fontos mérföldkő, ha az önvezető rendszerek itt is megbízhatóan tudnak működni. Kiemelte, hogy a környezetérzékelés, a szituációfelismerés, a hálózati késleltetések kezelése és a flottaszintű együttműködés mind olyan terület, ahol még sok feladat vár a fejlesztőkre.
Beszélt arról is, hogy a mesterséges intelligenciába vetett bizalom alapvető kérdés, mert a társadalom érthető módon sokkal kevésbé tolerálja a gépek által okozott hibákat, mint az emberi vezetők tévedéseit. A baleseti valószínűséget elméletileg a „10 a mínusz 9-ediken” szint közelébe kellene szorítani, vagyis extrém alacsony hibaarányra van szükség ahhoz, hogy a technológia széles körű elfogadást kapjon. Szerinte ebben a validáció, a verifikáció, a digitális ikrek, a szimulációk és a fizikai tesztkörnyezetek egyaránt kulcsszerepet játszanak.
Az eseményen többször is elhangzott, hogy az önvezető taxik nem elszigetelt fejlesztést jelentenek, hanem egy szélesebb magyar technológiai stratégiába illeszkednek.
Palkovics arról beszélt, hogy a ZalaZONE-t nem szabad pusztán tesztpályaként számon tartani, mert az kutatóhelyként és rendszerintegrációs központként is működik. Magyarország a területen nem akar megállni, mert az autonóm járművek után már a humanoid robotok fejlesztése* rajzolódik ki következő nagy célként.
Bokor József ehhez kapcsolódva arról beszélt, hogy a ZalaZONE köré európai koordinációs és integrációs központot szeretnének építeni, amelyben több egyetem, kutatóintézet és ipari szereplő dolgozhat együtt. A Bosch jelenlétét is fontos példaként említette, jelezve, hogy a kutatás és az ipari fejlesztés már most is összekapcsolódik-
A kérdés, hogy mikor és milyen feltételek mellett jelenhetnek meg a mindennapi forgalomban. A kormánybiztos szerint van mire alapozni: a Microsoft friss adatai alapján Magyarország az AI használatában a világ élmezőnyében van, a 19. helyen áll 147 ország versenyében.
*Palkovics László egy másik jövőképet is felvázolt: ha Magyarország képes autót gyártani, képes humanoid robotot is gyártani, a két termék műszaki összetettségét hasonlónak látja. „Egy humanoid robot nem bonyolultabb, mint egy autó. Ugyanazok a szenzorai, ugyanazok a vezérlőegységei.” A hangsúlyt mégsem a gyártásra, hanem a testre szabásra és a betanításra helyezte, amire már létrehoztak egy humanoid robotkutató központot a HUN-REN SZTAKI-ban. 2025 decemberében jelentették be, hogy a SZTAKI-ban új humanoid robotikai kutatócsoport alakult, amely a korábbi autonóm járműfejlesztésekre alapoz. A robotokat -a feladatai szerint- sok kölönböző tevékenységre kell betanítani, vannak közöttük egyszerűek, és vannak olyanok, amelyek a saját területükön többet tudnak mint egy ember.
A kormánybiztos az elmúlt egy év mérlegét is megvonta: egy évvel ezelőtt Magyarország 47 értékelt ország közül a 41. helyen állt az MI-alkalmazás terén. A Microsoft 2025 végi, 147 országot érintő felmérésén már a 19. helyre kerültünk, megelőzve Németországot, Dániát és szinte az összes szomszédos országot, Ausztria kivételével.
A legtöbb modern autóban alapfelszereltség a hangvezérlés, pl. taxiknál a célállomás megadása, hanggal állítható a hőmérséklet, a zene, vagy hogy parkoljon le.
Az autók mellett számos más "önjáró" robot is létezik:
- Házhozszállító robotok: kis, kerekeken guruló dobozok, amelyek az utcán navigálva viszik ki az ételt vagy csomagokat (pl. Starship Technologies).
- Humanoid robotok: mint a Tesla Optimusa, amelyeket arra terveznek, hogy gyárakban dolgozzanak vagy akár otthoni segítséget nyújtsanak hangutasítások alapján.
Magyarország ezen a téren regionális központtá vált. A ZalaZONE tesztpálya Zalaegerszegen található, Európa egyik legmodernebb tesztpályája, ahol kifejezetten az önvezető autók és a 5G-alapú kommunikáció (autó-autó közötti beszélgetés) lehetséges. Itt tesztelik, hogyan reagál a gép, ha hangutasítást kap egy bonyolult forgalmi helyzetben.
Budapesti fejlesztőközpontok: aiMotive (melyet a Stellantis vásárolt fel) vagy a Continental, Budapesten fejlesztik azokat a szoftveres „agyakat”, amik képessé teszik az autókat a környezet felismerésére és a hangalapú interakcióra.A jövőben nemcsak autók, hanem önjáró mikrobuszok is megjelenhetnek a városi tömegközlekedésben (hasonlóan a budapesti Graphisoft Parkban végzett korábbi tesztekhez), ahol az utasok hanggal jelezhetik megállási szándékukat vagy úticéljukat. A technológiai háttér mellett jelenleg a jogi kereteken van a hangsúly: ki a felelős, ha egy hangutasításra induló robotautó hibázik?
A biztonság a legkritikusabb pont, egy félreértett hangutasítás (például egy háttérben szóló rádió vagy egy gyerek kiáltása miatt) balesetveszélyes helyzetet teremthet. A fejlesztők több technológiai „szűrővel” dolgoznak a hibák kizárásán:
- Többcsatornás megerősítésnél a rendszer nem hajt végre kritikus manővert (pl. „állj meg most!” vagy „kanyarodj balra”) pusztán egyetlen elhangzott mondat alapján. Gyakran visszakérdez, vagy vizuális megerősítést kér a műszerfalon.
- Akusztikus nyalábformálás (Beamforming): speciális mikrofonrendszerekkel az autó pontosan beazonosítja, honnan érkezik a hang, csak a vezetőülésből érkező parancsokat fogadja el, a hátsó ülésen beszélgetők vagy a külső zajok nem zavarják meg.
- A mesterséges intelligencia (Natural Language Processing) nemcsak szavakat figyel, hanem kontextust is. Ha a parancs ellentmond a szenzorok (radar, LIDAR) adatainak – például „indulj el”, de fal van az autó előtt –, a gép felülbírálja az utasítást a biztonság érdekében.
A legfontosabb biztonsági parancsokat nem a felhőben, hanem helyben, az autó saját számítógépén dolgozzák fel, hogy ne legyen késleltetés, és az internetkimaradás se okozzon gondot.
Az autók mellett számos más "önjáró" robot is létezik:
- Házhozszállító robotok: kis, kerekeken guruló dobozok, amelyek az utcán navigálva viszik ki az ételt vagy csomagokat (pl. Starship Technologies).
- Humanoid robotok: mint a Tesla Optimusa, amelyeket arra terveznek, hogy gyárakban dolgozzanak vagy akár otthoni segítséget nyújtsanak hangutasítások alapján.
Magyarország ezen a téren regionális központtá vált. A ZalaZONE tesztpálya Zalaegerszegen található, Európa egyik legmodernebb tesztpályája, ahol kifejezetten az önvezető autók és a 5G-alapú kommunikáció (autó-autó közötti beszélgetés) lehetséges. Itt tesztelik, hogyan reagál a gép, ha hangutasítást kap egy bonyolult forgalmi helyzetben.
Budapesti fejlesztőközpontok: aiMotive (melyet a Stellantis vásárolt fel) vagy a Continental, Budapesten fejlesztik azokat a szoftveres „agyakat”, amik képessé teszik az autókat a környezet felismerésére és a hangalapú interakcióra.A jövőben nemcsak autók, hanem önjáró mikrobuszok is megjelenhetnek a városi tömegközlekedésben (hasonlóan a budapesti Graphisoft Parkban végzett korábbi tesztekhez), ahol az utasok hanggal jelezhetik megállási szándékukat vagy úticéljukat. A technológiai háttér mellett jelenleg a jogi kereteken van a hangsúly: ki a felelős, ha egy hangutasításra induló robotautó hibázik?
A biztonság a legkritikusabb pont, egy félreértett hangutasítás (például egy háttérben szóló rádió vagy egy gyerek kiáltása miatt) balesetveszélyes helyzetet teremthet. A fejlesztők több technológiai „szűrővel” dolgoznak a hibák kizárásán:
- Többcsatornás megerősítésnél a rendszer nem hajt végre kritikus manővert (pl. „állj meg most!” vagy „kanyarodj balra”) pusztán egyetlen elhangzott mondat alapján. Gyakran visszakérdez, vagy vizuális megerősítést kér a műszerfalon.
- Akusztikus nyalábformálás (Beamforming): speciális mikrofonrendszerekkel az autó pontosan beazonosítja, honnan érkezik a hang, csak a vezetőülésből érkező parancsokat fogadja el, a hátsó ülésen beszélgetők vagy a külső zajok nem zavarják meg.
- A mesterséges intelligencia (Natural Language Processing) nemcsak szavakat figyel, hanem kontextust is. Ha a parancs ellentmond a szenzorok (radar, LIDAR) adatainak – például „indulj el”, de fal van az autó előtt –, a gép felülbírálja az utasítást a biztonság érdekében.
A legfontosabb biztonsági parancsokat nem a felhőben, hanem helyben, az autó saját számítógépén dolgozzák fel, hogy ne legyen késleltetés, és az internetkimaradás se okozzon gondot.